 ผู้ค้าทีวี
ผู้ค้าทีวี 


การออกแบบการตรวจจับและตอบโต้แบบครบวงจร, โดยไม่มีชิ้นส่วนเพิ่มเติมใดๆ, มีความยืดหยุ่นและสะดวกสำหรับการพกพาส่วนบุคคล. จีบ- พอร์ตการตรวจจับรอบทิศทาง 3 กม. และอินเตอร์ทิศทาง 2 กม- การอ้างอิงสำหรับ UAV ทั่วไปทุกประเภทในน่านฟ้าโดยรอบ. ติดตั้งเทคโนโลยี SDR และระบบเล็งเสริมการมองเห็น, มันสามารถตรวจจับได้, ค้นหาและระบุ UAV ได้ที่ 360°, และปราบปรามอย่างครอบคลุม, บังคับให้ UAV บินโฉบ, กลับหรือที่ดินตามกลยุทธ์ที่ปลอดภัยของตนเอง.

*โปรดทราบว่าการปรากฏตัว, ข้อกำหนดและฟังก์ชั่นอาจแตกต่างกันโดยไม่ต้องแจ้งให้ทราบล่วงหน้า.
| แบบอย่าง | TXPG2000-A | TXPG2000-B |
| คุณสมบัติการออกแบบ | การตรวจจับการรวม Jam, การติดขัดที่คล่องตัว, การติดขัดแบบเต็มแบนด์, ตำแหน่งที่ได้รับความช่วยเหลือ, การติดขัดแบบกำหนดเอง | การออกแบบแบบครบวงจร, บูรณาการ, การรบกวนที่มีประสิทธิภาพ, การรบกวนหลายความถี่ |
| วงการตรวจจับ | 100เมกะเฮิรตซ์ ~ 6000 เมกะเฮิรตซ์ | 700เมกะเฮิรตซ์, 900เมกะเฮิรตซ์, 1.1กิกะเฮิรตซ์, 1.2กิกะเฮิรตซ์, 1.4กิกะเฮิรตซ์, 2.4กิกะเฮิรตซ์, 5.8กิกะเฮิรตซ์ |
| โมเดลการตรวจจับ | โดรน DIY FPV (ELRS/TBS ครอสไฟร์), โดรนธรรมดา (DJI/Autel/นกแก้ว), โดรนที่ใช้ WiFi | UAV ทั่วไปทุกประเภท |
| ทิศทางการตรวจจับ & ระยะทาง | 360° รอบทิศทาง ≥ 3 กม (เปิด), 0.5~1กม (ในเมือง) | การตรวจจับทิศทางสูงสุด 2 กม (เปิด), 0.5-1กม (ในเมือง) |
| วงแจมมิง | 400เมกะเฮิรตซ์ / 800~900เมกะเฮิรตซ์ / 1.2กิกะเฮิรตซ์ / 1.4กิกะเฮิรตซ์ / 1.5กิกะเฮิรตซ์ / 2.4กิกะเฮิรตซ์ / 5.2กิกะเฮิรตซ์ / 5.8กิกะเฮิรตซ์ / 700เมกะเฮิรตซ์ ~ 3GHz (ซอฟต์แวร์กำหนด) | 433เมกะเฮิรตซ์, 900เมกะเฮิรตซ์, 1.2กิกะเฮิรตซ์, 1.4กิกะเฮิรตซ์, 1.5กิกะเฮิรตซ์, 2.4กิกะเฮิรตซ์, 5.2กิกะเฮิรตซ์, 5.8กิกะเฮิรตซ์ |
| ความแม่นยำในการค้นหาทิศทาง | 10° (สภาพแวดล้อมแบบเปิด) | |
| มุมติดขัด | การติดขัดในทิศทาง, แนวนอน 45°, เอียง 30° | |
| ระยะทางติดขัด | ≥ 2 กม | |
| เวลาตอบสนอง | < 5ส | |
| ประเภทแบตเตอรี่ | แบตเตอรี่ลิเธียมแบบถอดเปลี่ยนได้ | |
| อายุการใช้งานแบตเตอรี่เดียว | ≥ 15 นาที (ระบบส่งกำลังเต็มรูปแบบ) | ≥ 45 นาที (ระบบส่งกำลังเต็มรูปแบบ) |
| ขนาด | 653*407*187มม | 700มม.*322มม.*100มม |
| น้ำหนัก | ≤ 7กก | ≤ 4.5กก |
| ระดับ IP | IP54 | |
| อุณหภูมิในการทำงาน | -30°ซ ~ +55°ซ | -30°ซ ~ +45°ซ |
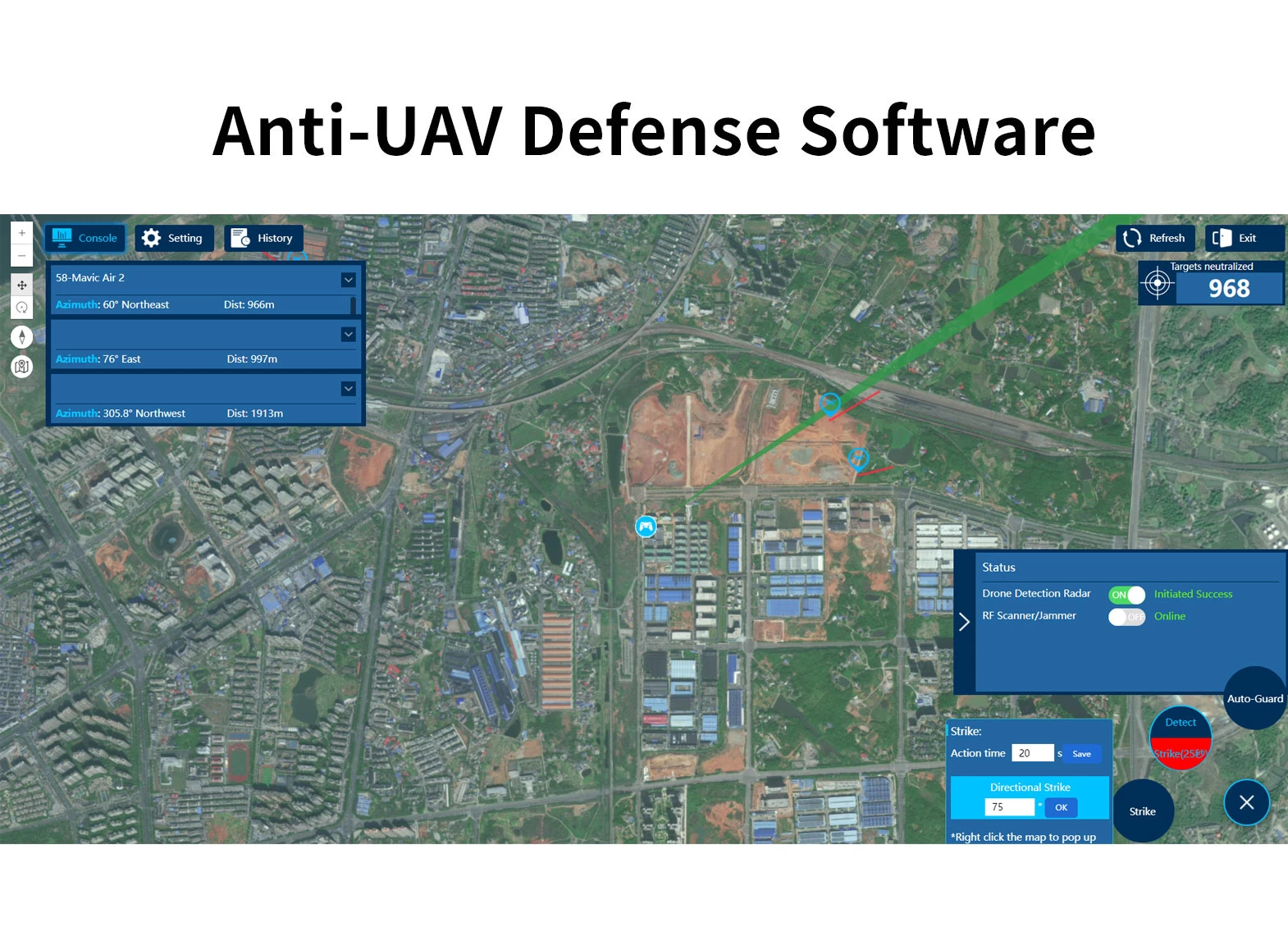
ระบบป้องกันอากาศยานไร้คนขับประกอบด้วยอุปกรณ์ส่วนหน้า เช่น เรดาร์ตรวจจับ, เครื่องตรวจจับคลื่นความถี่วิทยุ, กล้องติดตาม E/O, อุปกรณ์รบกวนหรือปลอมแปลง RF และซอฟต์แวร์แพลตฟอร์มควบคุม UAV. เมื่อโดรนเข้าสู่เขตป้องกัน, หน่วยตรวจจับจะส่งข้อมูลตำแหน่งที่แม่นยำผ่านระยะทางที่ใช้งาน, มุม, ความเร็วและความสูง. เมื่อเข้าสู่เขตเตือนภัย, ระบบจะกำหนดอย่างอิสระและเริ่มการทำงานของอุปกรณ์รบกวนเพื่อรบกวนการสื่อสารของโดรน, เพื่อให้โดรนกลับหรือลงจอด. ระบบรองรับอุปกรณ์หลายตัวและการจัดการหลายโซนและสามารถรับรู้ได้ 7*24 การตรวจสอบทุกสภาพอากาศและการป้องกันการบุกรุกของโดรน.
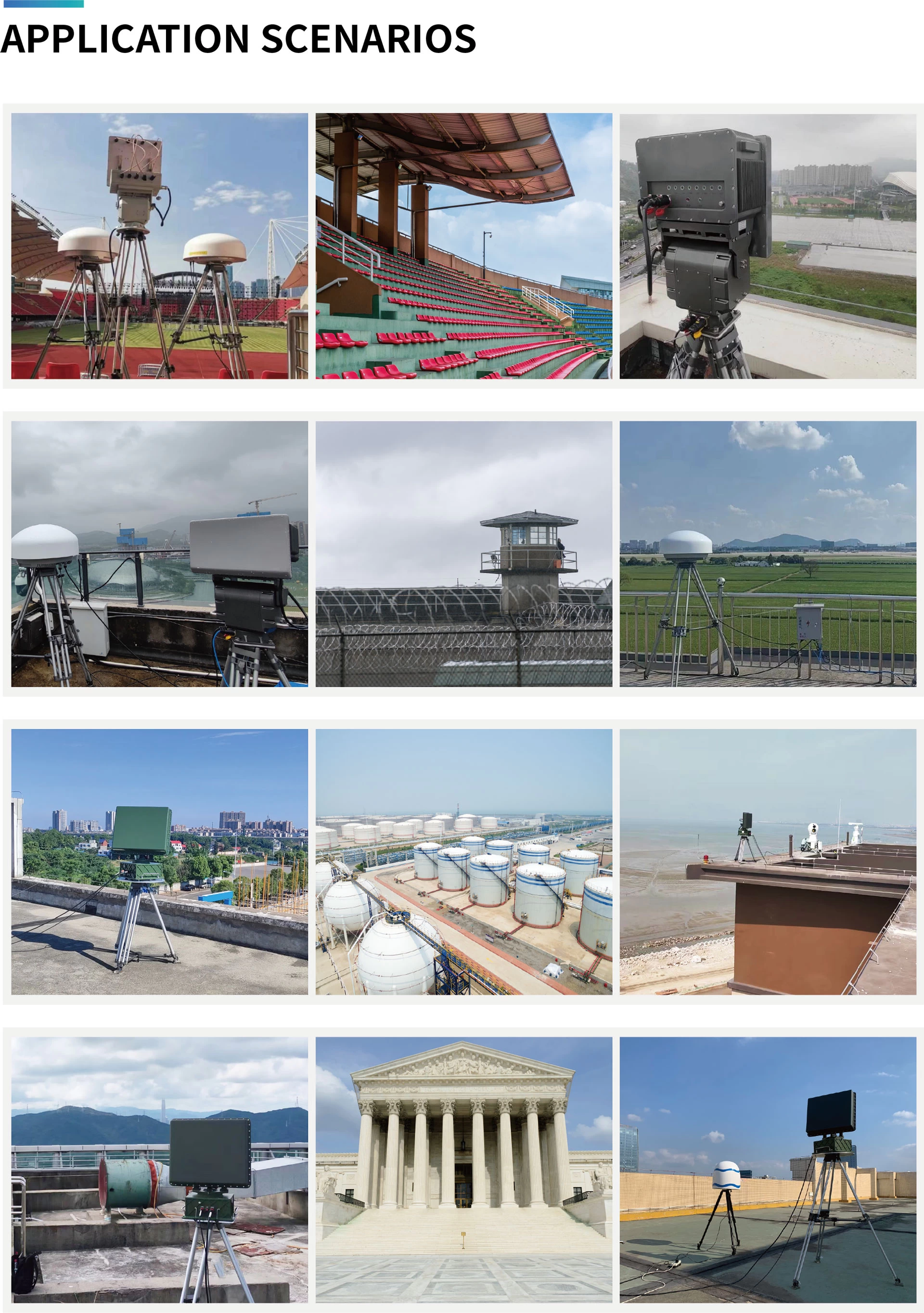
ระบบป้องกันอากาศยานไร้คนขับประกอบด้วยเรดาร์หรือหน่วยตรวจจับ RF, หน่วยติดตาม EO และหน่วยติดขัด. ระบบผสมผสานการตรวจจับเป้าหมาย, ติดตาม & การยอมรับ, สั่งการ & ควบคุมการติดขัด, มัลติฟังก์ชั่นในหนึ่งเดียว. ขึ้นอยู่กับสถานการณ์การใช้งานที่แตกต่างกัน, ระบบสามารถปรับใช้ได้อย่างยืดหยุ่นในโซลูชันที่เหมาะสมที่สุดโดยการเลือกหน่วยตรวจจับและอุปกรณ์รบกวนที่แตกต่างกัน. AUDS สามารถติดตั้งแบบคงที่ได้, รถยนต์ติดตั้งหรือพกพา. ตามประเภทการติดตั้งแบบตายตัว, AUDS ถูกนำมาใช้กันอย่างแพร่หลายในเว็บไซต์ป้องกันความปลอดภัยระดับสูง, แบบติดตั้งบนยานพาหนะ โดยปกติจะใช้สำหรับการลาดตระเวนตามปกติหรือมากกว่า, และแบบพกพาก็นิยมใช้ป้องกันชั่วคราวมาก & ควบคุมในการประชุมสำคัญ, กิจกรรมกีฬา, คอนเสิร์ต ฯลฯ.















วีแชท
สแกนรหัส QR ด้วย wechat